Description
Lidar Sensor 3D Scanner Radar 5mm Obstacles Accurate Recognition Avoidance 90 Degree FOV 54.010008
State of Assembly: Ready-to-Go
Certification: CE
Camera Equipped: No
Model Number: 54.010008
Such device can realize laser rangefinding of 90-degree FOV and generate point cloud information. It is widely used in robotic positioning and mapping, planning and navigation, as well as autonomous dynamic and little obstacle avoidance, etc., which greatly improves the processing capacity and user experience of robots for small obstacles.
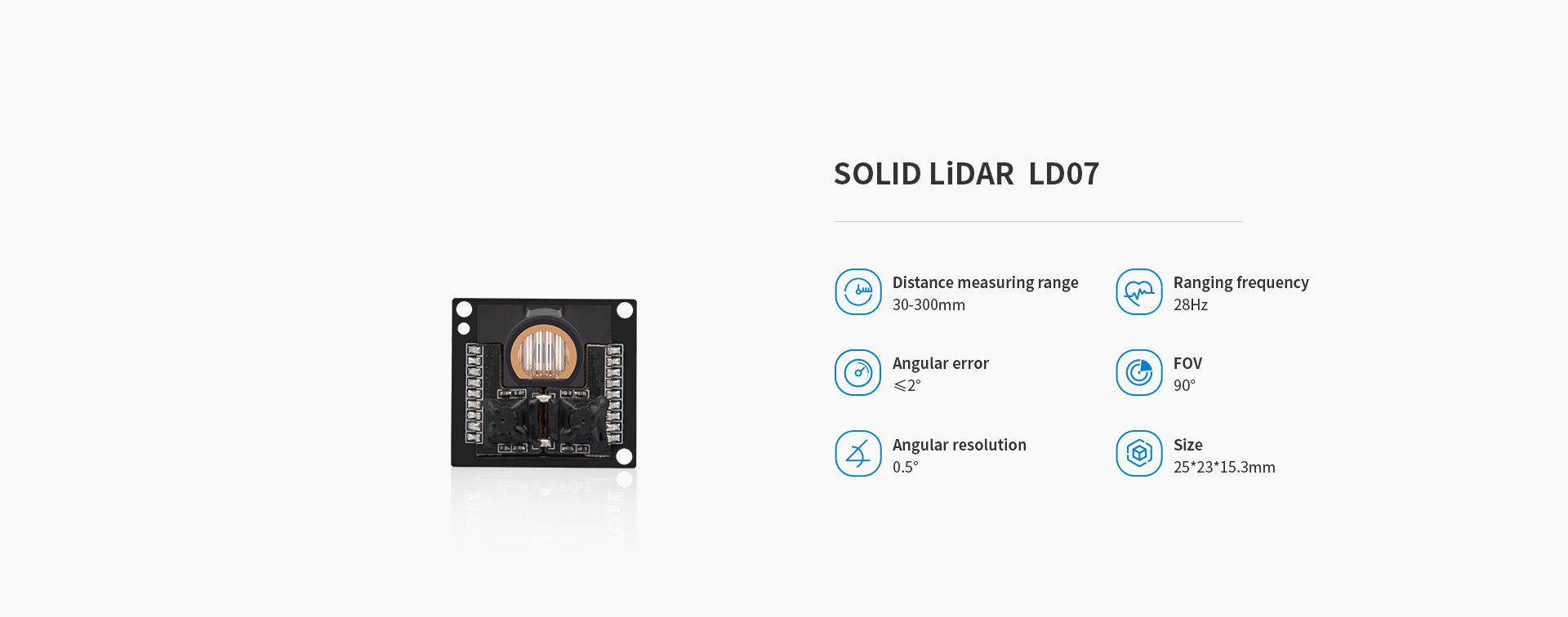
LD07 is a short- range one – dimensional solidlaser radar, small in size. and low in price, especiallysuitable for obstacle avoidance applications ofrobots.
The LD07 is a short-range solid-state radar witha range of 30- 300mm. It is mainly composed of alinear laser and cameras. After the laser is sendingout by the linear laser device, it is captured by thecamera. Based on the fixed structure of the laser andthe camera, combining with triangulation measuring principle, we can calculate the distance between theobject and LD07. Then according to the camera fixed parameters,we can get the angle value of themeasured object in the radar coordinate system. Thus,we obtain the complete point cloud map of target object.
The common usage of LD07 obstacle avoidanceapplications is shown as the figure below.
Two laser lines are installed. in the front side towards the ground at a certain angle to measure the distance and angle of obstacles. Alternatively, another one is installed on the side and the laser line is emitted vertically to the ground for walking along the edge of the obstacle. This method is especially useful for avoiding low obstacles such as electric wires, slippers and carpets etc.
Features
5 mm obstacles accurate recognition
10 mm accurately along the wall
28HZ measurement frequency
Ultra- thin appearance
Laser safety FDA Class Ⅰ
90° FOV
10000h service life
Application Field
Education
Scientific research
Algorithm
Robot obstacle avoidance
Autonomous navigation
Navigation and positioning