



Description
- Brand Name: POELIDAR
- Origin: Mainland China
Dear buyer friend, for this valuable product, please contact the seller to discuss the payment method before buying, otherwise we may not be able to deliver.

Velodyne LiDAR PUCK
Velodyne’s new VLP-16 sensor is the smallest, newest, and most advanced product in Velodyne’s 3D LiDAR product range. Vastly more cost-effective than similarly priced sensors, and developed with mass production in mind, it retains the key features of Velodyne’s breakthroughs in LiDAR: Real-time, 360°, 3D distance and calibrated reflectivity measurements.
3D – Real Time – LiDAR
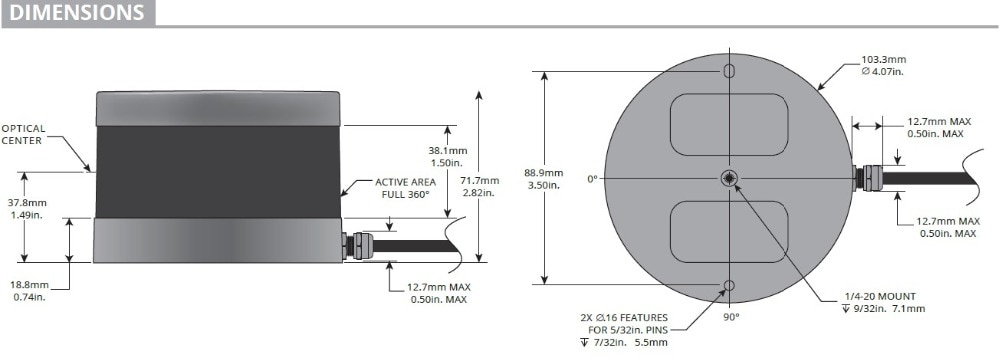
The VLP-16 has a range of 100m, and the sensor’s low power consumption (~8W), light weight (830 grams), compact footprint (~Ø103mm x 72mm), and dual return capability make it ideal for UAVs and other mobile applications. Velodyne’s LiDAR Puck supports 16 channels, ~300,000 points/sec, a 360°
horizontal field of view and a 30° vertical field of view, with +/- 15° up and down. The Velodyne LiDAR Puck does not have visible rotating parts, making it highly resilient in challenging environments (Rated IP67).
KEY FEATURES
-
100 m range with compact form factor
-
Proven 905 nm tech, with largest install base
-
Top-of-the-line field-of-view
-
Best-in-class accuracy and calibrated intensity
-
Best-in-class power and temperature range
-
Sensor-to-sensor interference mitigation feature
-
Optional, enhanced short range detection
-
Versatile, with attractive volume pricing
Specifications:
Sensor:
• Time of flight distance measurement with calibrated reflectivities
• 16 channels
• Measurement range up to 100 meters
• Accuracy: +/- 3 cm (typical)
• Dual returns
• Field of view (vertical): 30° (+15° to -15°)
• Angular resolution (vertical): 2°
• Field of view (horizontal/azimuth): 360°
• Angular resolution (horizontal/azimuth): 0.1° – 0.4°
• Rotation rate: 5 – 20 Hz
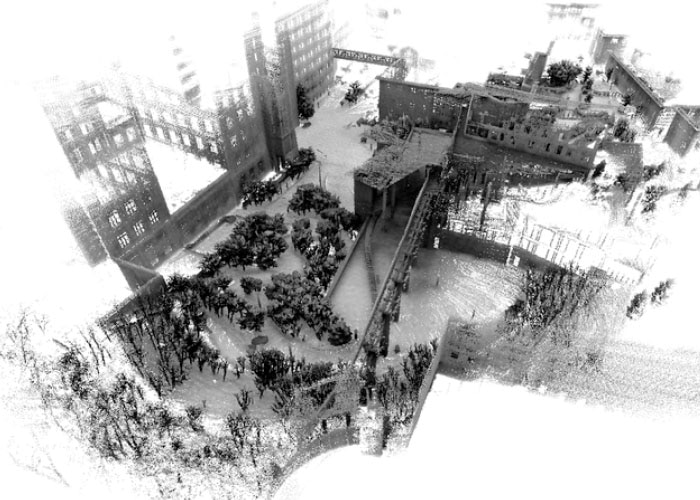
Data provided by Real Earth.
Data provided by XactSense.
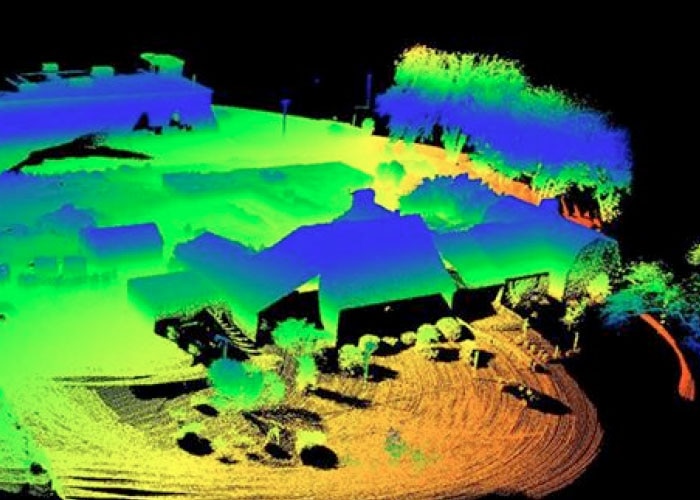
Data provided by Phoenix Aerial Systems.
VEHICLE LOCALIZATION
Single VLP16 (Velodyne 16) is being used for map based localization in fusion with IMU/Wheel-Encoder and prior 3D map (build using pose graph SLAM). A step towards low-cost localization.
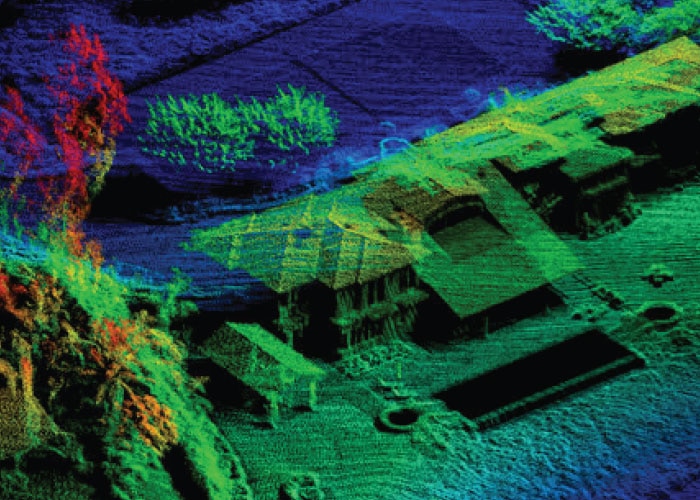
UAV LIDAR MAPPING SYSTEM
This video is an overview of the Phoenix Aerial AL3-16 Lidar Mapping system. In this video, a DJI S1000 is used and for the demonstration, we flew over an over an open pit. You’ll see how Lidar can pick up points underneath vegetation vs Photogrammetry will only map tree canopy.
UAV AIRBORNE LASER SCANNING
First experiment with the Velodyne Lidar ‘Puck’ mounted on a brushless gimbal on a Devourer X8 heavy-lift multi-rotor UAV.


