





Description
- Model Number: SF02/F
- Brand Name: FaseLase

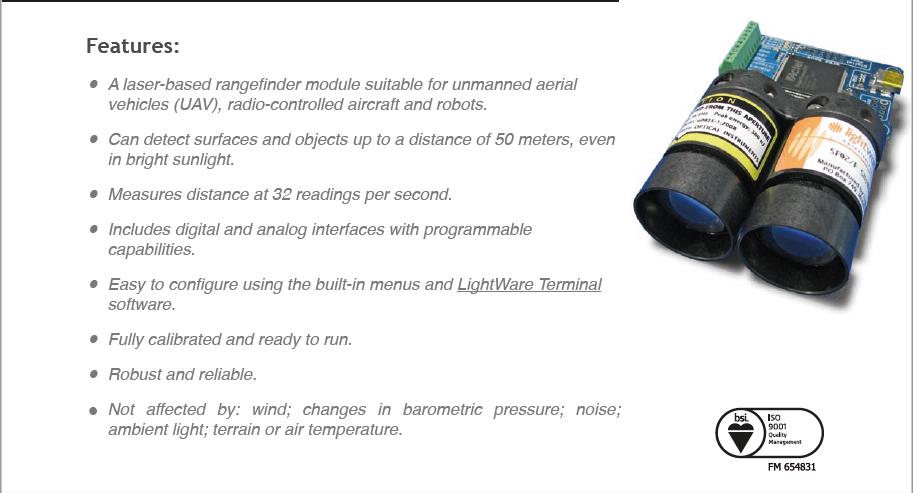
Lightware SF02 Rangefinder
The Lightware SF02 is lightweight laser rangefinder module that provides fast and accurate distance measurements up to 40 meters (130 feet). In tests by the development team the sensor has produced very reliable distance measurements for long and short ranges even on fast moving vehicles.
Warning
This rangefinder is only supported on the Pixhawk running AC3.2 or higher or recent versions of Plane and Rover using the sensor’s analog output much like an analog sonar.
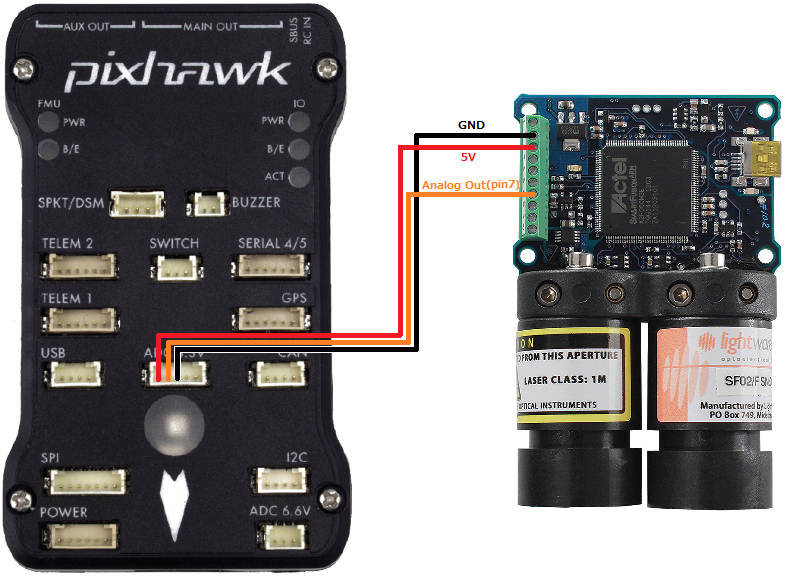
Connecting to the Pixhawk
The SF02’s Analog Out pin should be connected to the Pixhawk’s 3.3V ADC (analog to digital converter) as shown below. The Pixhawk will provide the regulated 5V power supply the sensor requires.
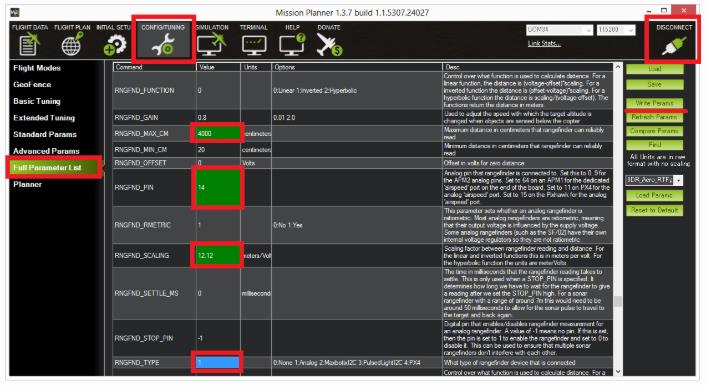
Setup through the mission planner
To configure Copter, Plane or Rover to use the LIDAR-Lite, please first connect with the Mission Planner and then open the Config/Tuning >> Full Parameter List page and set:
- RNGFND_MAX_CM = “3700” (i.e. 40m max range – 3m buffer. This buffer is required so the flight code can detect when there is nothing in range)
- RNGFND_PIN = “14” (2nd pin of 3.3V ADC connector)
- RNGFND_SCALING = “12.12” (ie. 40m / 3.3v = 12.12) **
- RNGFND_TYPE = “1” (Analog)
- RNGFND_RMETRIC = “0” (non-ratiometric, shown incorrectly in the diagram below)
** The default range for an SF02 is 33m / 3.3V = 10 m/V
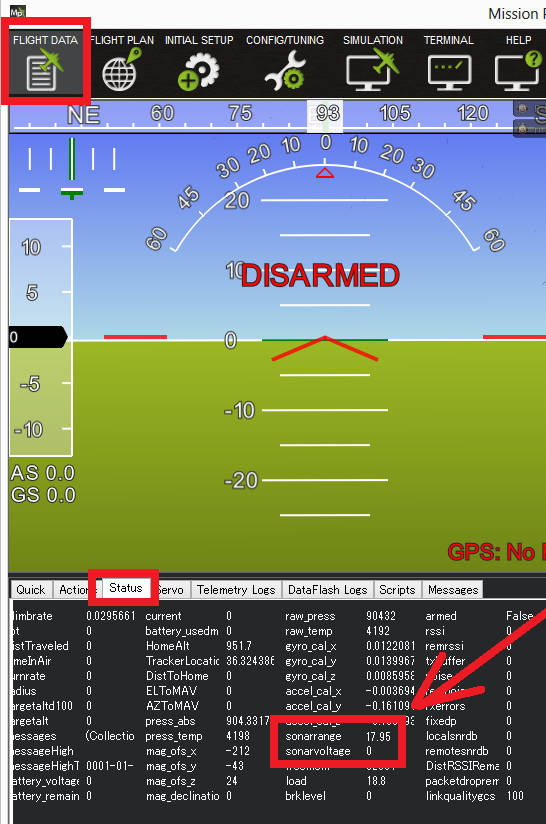
Testing the sensor
Distances read by the sensor can be seen in the Mission Planner’s Flight Data screen’s Status tab. Look closely for “sonarrange”.

Testing the SF/02 laser rangefinder on a Pixhawk on my Meridian. Worked very nicely! Some results:
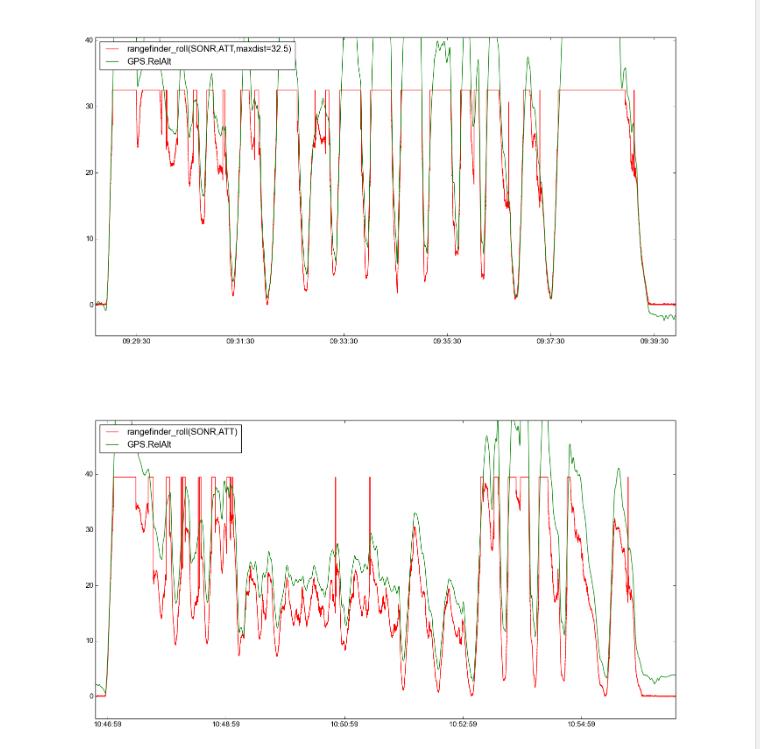
The baro showed a bit higher than the laser, but the laser was definitely much more accurate – the baro was affected quite a bit by the speed of the plane causing low pressure in the fuselage.
I connected it to the Pixhawk using the analog connection, on one of the two 3.3V ADC connectors. That gives very good resolution, and low noise.
Once PulsedLight’s LIDAR-Lite changes to using a laser (as they plan to do) and fix the short range and long range issues (bad values at ranges below 1.5m and bad values at long ranges) I hope the two will have similar performance, and the I2C connection on the PulsedLight module will be a better fit. The LIDAR-Lite prototype I have now has a range of about 12m compared to 40m for the SF/02, and gives bad data at short and long ranges, so right now the SF/02 is better for the work I’m doing on landing, but longer term I’m hoping the LIDAR-Lite will be a great option

